
Тег: квадрокоптер


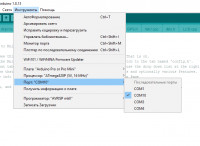

Всем привет. Сегодня обзавёлся простеньким Bluetooth модулем для работы с различными девайсами через BT, в частности, для беспроводного подключения к бортовому компьютеру квадрокоптера...

Первый тестовый полёт с новой камерой H9 закончился небольшим краш-тестом